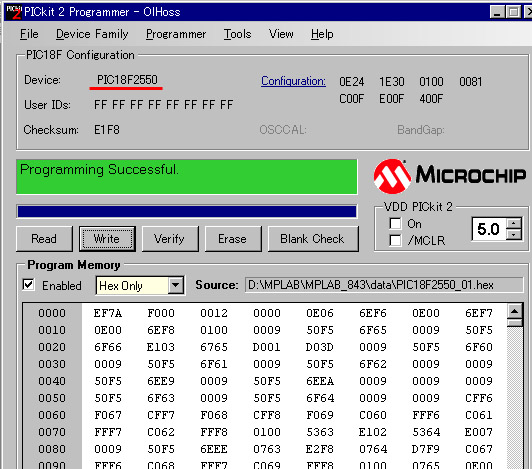
偲傝偁偊偢侾俇俥俉俉偱偺僐傾僔僗僥儉姰惉傪払惉偟偰丄尰嵼恖拰幚尡恑峴拞丅
儅儞僔儑儞偺挀椫応偵抲偄偰僇僶乕傪妡偗偨乽俥倅侾丂俥俙倅俤俼乿傊偺憰拝丅
偭偰帠偱丄姰惉昳傪帩偭偰偄偐傟偰偟傑偭偨偺偱丄僽儗僀僋偟偨僽儗僢僪儃乕僪偵怴偨側僠僢僾傪憰揢両
侾俇俥俉俉偺僾儘僌儔儉椞堟係倠傪巊偄愗偭偰偟傑偭偨帠偐傜丄戝梕検偺俠俹倀扵偟丅
廐寧揹巕偺俫俹傪扵偟偰偄偰丄
偍偍乣偭両乽俉俈俀俀乿偭偰侾俀俉倠傕偁傞両俉俉偺俁俀攞偠傖傫両丒丒丒丒偱傕丒丒丒丒俿俻俥俹偠傖僟儊偠傖傫両
偍偍偭両乽係俆俉俆乿偭偰係俉倠偁傞側両偙傟偱傕侾俀攞両丒丒丒丒偱傕係侽僺儞偭偰丒丒丒丒僨僇夁偓両
偦傫側拞偱乽俹俬俠侾俉俥俀俆俆侽乿偑栚偵晅偄偨丅
僾儘僌儔儉梕検偑俁俀倠偲俉攞偱偼偁傞偑丄
丒俀俉僺儞偲彫宆乮偦傟偱傕俉俉偺侾丏俆攞偩偗偳両乯
丒俬乛俷俀係杮
丒倀俽俛儌僕儏乕儖搵嵹
丒俙乛俢丗侾侽們倛
丒俤倀俽俙俼俿搵嵹
丒俿俬俵俤俼俁屄
丒撪晹僋儘僢僋俉俵俫倸
偲椙偄姶偠丅
摿偵倀俽俛愙懕偑壜擻側傜丄
丒俹俠偐傜偺僶僗僷儚乕偵傛傞揹尮妋曐偱僽儗僢僪儃乕僪乮奐敪乯忋偱俙俠傾僟僾僞晄梫両
丒倀俽俛弌椡偵傛傞僨僶僢僌偑壜擻偱俼俽俀俁俀亅俠偺僠僢僾仌僾儘僌儔儉偑晄梫両
丒彨棃倀俽俛傪夘偟偨俠俹倀偺峏怴偑壜擻丠乮偐傕丠乯
偭偰帠偱偙傟偵寛掕丅
偲懕偗偰廐寧偺俫俹傪減渏偟偰偄傞偲丄
乽俹俬俠侾俉俥俀俆俆侽巊梡倀俽俛儅僀僐儞儃乕僪乿側傞廐寧揹巕偑惢嶌偟偨儌僕儏乕儖傪敪尒両
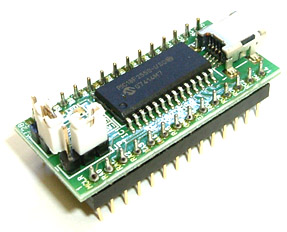
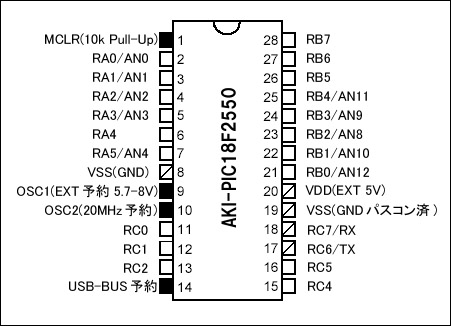
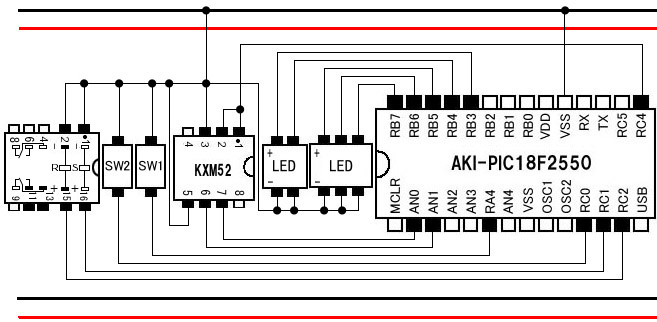
仭婎斅偵USBminiB僐僱僋僞丆儅僀僐儞丆20MHz敪怳巕傪搵嵹偟偰USB婡婍傪梕堈偵惢嶌偱偒傞條偵側偭偰偄傑偡
仭婎斅僒僀僘40mm亊18mm偱28僺儞IC僜働僢僩偵憰拝偱偒傞彫宆僒僀僘偱偡
仭20MHz敪怳巕傪搵嵹偟撪晹PLL偱48MHz偱摦嶌丅PIC儅僀僐儞偲偲偟偰傕崅懍崅惈擻偱偡
偲傑偀丄倀俽俛僜働僢僩傕奜晹僋儘僢僋俀侽俵俫倸傕俵俠俴俼僾儖傾僢僾傕倁俢俢乛倁俽俽僾儖僟僂儞傕搵嵹偟偨俢俬俹僺儞僞僀僾偺儌僕儏乕儖側偺偩両
僗僎僢両儃乕僪忋偱寢峔側攝慄偐傜奐曻偝傟偦偆丒丒丒丒侓
偄丄偄偐傫丒丒丒丒僒儃儕暼偑偙傫側張偱傕丒丒丒丒偱傕偲偭偰傕枺椡揑侓
偱丄偙傟偵寛掕丒丒丒丒丒丅
 嘥丏奐敪尵岅偺曄峏
嘥丏奐敪尵岅偺曄峏
乽俫俬亅俿俤俠俫丂俠乿偼侾俉偱傕壜擻偩偲敾偭偰偼偄傞偑丄偳偆傕儅僀僋儘僠僢僾幮偑媧廂偟偰偐傜懸嬾偑埆偄丅
偩偐傜偙偙偼尦偐傜偁傞乽俵俹俴俙俛丂俠侾俉乿偲偄偆俠尵岅偵愗傝懼偊傞帠偵偟偨丅
僀儞僗僩乕儖屻偵偲偵偐偔娙扨側僜乕僗傪僐僺儁偟偰條巕傪尒傛偆偲僐儞僷僀儖偡傞傕偙傫側寢壥偵丅乮仺乯
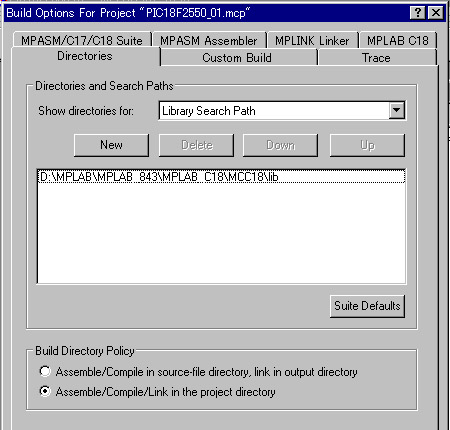
儔僀僽儔儕傪儕儞僋偟偰傗傜側偄偲僟儊側傛偆偩丅
乽Build Option乿偺乽Directories乿偐傜乽Library Search Path乿偱乽MCC18偺Lib乿偺応強傪巜掕偟偰傗傞丅
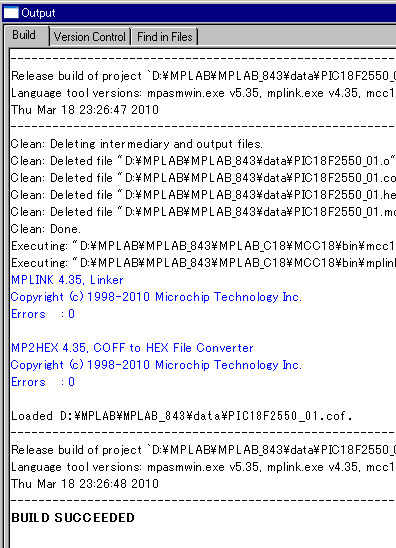
偡傞偲傾僢僒儕偲惉岟両
偙偺僐儞僷僀儔偼儊儌儕儐乕僘僎乕僕偼弌偟偰偔傟側偄傛偆偩丅
巆擮丅
偪側傒偵儔僀僞乕傕僥僗僩丅
偟偭偐傝斀墳偟偰偄傞丅
偟偐偟嵟弶偵俀俉僺儞偵嵎偟偨傜僄儔乕偵側偭偨丅
偳偆傕係侽僺儞偵嵎偝側偄偲僟儊側傛偆偱偁傞丅
嘦丏梡堄偡傞傕偺
 愇偺夝愅傕俁偮栚偵側傞偲帠慜偵梡堄偟偰偍偔傋偒僨乕僞僔乕僩偑尒偊偰偔傞丅
愇偺夝愅傕俁偮栚偵側傞偲帠慜偵梡堄偟偰偍偔傋偒僨乕僞僔乕僩偑尒偊偰偔傞丅
愭偢偼偙傟乮仺乯
偟偐偟廐寧偺儅僀僐儞儃乕僪偩偲偙偆側傞丅乮仺乯
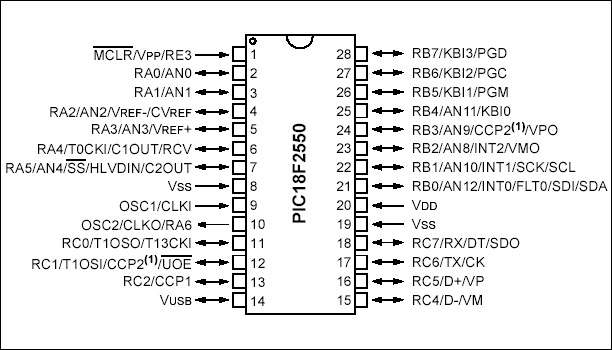
俋僺儞偲侾侽僺儞偼俀侽俵俫倸偺僋儕僗僞儖偑幚憰嵪傒偩偑丄俆丏俈倁乣俉倁偺奜晹揹埑擖椡傪峴偄偨偄帪偼幚憰嵪傒偺儗僊儏儗乕僞乮倃俠俇俀侽俇俹俆侽俀乯傪夘偟偰俋僺儞偵愙懕偡傞帠偑弌棃傞傛偆偩丅
壗屘僆僔儗乕僞偺僺儞傪巊偊傞偺偐丠偼抦傜傫両
傑偨奜晹儗僊儏乕僞傪夘偟偰俆倁擖椡傪峴偄偨偄帪偼丄倁俢俢乮俀侽僺儞乯偵愙懕偡傟偽僷僗僐儞嵪傒偲側傞丅
崱夞偼僶僀僋乮侾俀倁乯偩偐傜幚幵幚憰帪偼倁俢俢傪夘偡傞帠偵側傞丅
傾僫儘僌擖椡偼侽乣係偲俉乣侾侾偺侾侽僠儍儞僱儖偩偑丄億乕僩俙偺俆僠儍儞僱儖傕偁傟偽廫暘偩傠偆偐傜億乕僩俛偼慡偰僨僕僞儖弌椡偲偟偰埖偆帠偵偡傞丅
億乕僩俠偺俇斣俈斣偼擮偺堊偵俼俽俀俁俀亅俠梡偵妋曐偟偰偍偙偆丅
偭偰側栿偱僨僕丒傾僫崌寁偱侾俋僠儍儞僱儖傕偺巊梡偑壜擻偩両
偦傟偐傜丄
丒忋婰傪娷傫偩僨乕僞丒僔乕僩
丒曄悢掕媊傪妋擣偡傞堊偺僿僢僟乕僼傽僀儖
丒廐寧揹巕偺A063_USB儅僀僐儞儃乕僪
丒俵俹俴俙俛偺俫俤俴俹偐傜敳悎偟偨僐儞僼傿僌儗乕僔儑儞丒價僢僩
偦偟偰俽俥俼儅僢僾丅
嵟屻偵儗僕僗僞丒僒儅儕偩丅
乮側傫偪傘乣僨僇偝傗両乯
嘨丏僾儘僌儔儉偺堏怉
僨傿儗乕偵偮偄偰
俠侾俉尵岅偱偼捈愙帪娫傪巜掕偡傞僨傿儗僀偺娭悢偑柍偄傜偟偄丅
愭偢丄delays.h傪僀儞僋儖乕僪偡傞帠偱乭Delay1TCY()乭偲偄偆侾柦椷傪婎挷偲偡傞帪娫妱偩偟娭悢偑巊偊傞傛偆偵側傞丅
廃攇悢偵懳偟偰乽係僒僀僋儖偱侾柦椷乿偺婎杮偐傜丄
侾柦椷偵梫偡傞帪娫亖侾乛乮廃攇悢乛係乯
偲側傝丄俀侽俵俫倸偺応崌偼丄
1/(20000000/4)=0.2儅僀僋儘昩
偲側傝丄
1ms偺僂僃僀僩偵昁梫側學悢亖5,000
10ms=50,000
100ms=500,000
1s=5,000,000
偲側傞丅
扐偟丄堷悢偼侾乣俀俆俆側偺偱丄偙傫側悢抣偼埖偊側偄丅偩偐傜丄
Delay10TCYx()丗侾侽柦椷暘偱曉偡
Delay100TCYx()丗侾侽侽柦椷暘偱曉偡
Delay1KTCYx()丗侾侽侽侽柦椷暘偱曉偡
Delay10KTCYx()丗侾侽侽侽侽柦椷暘偱曉偡
偲偄偭偨娭悢傪梡堄偟偰偄傞丅
偙傟傛傝丄
1ms=Delay1KTCYx(5)
10ms=Delay10KTCYx(5)
100ms=Delay10KTCYx(50)
0.5s=Delay10KTCYx(250)
1s=Delay10KTCYx(250)傪俀夞
偲側傞栿偩丅
偟偐偟偙偺僨傿儗僀棈傒偱偪傚偭偲崿棎偟偨偺偑倀俽俛丅
僨儌僾儘偱忋婰傪幚峴偟偰傕儊僠儍儊僠儍懍偔摦偄偰偟傑偭偨丅壗偱丠
僨儌僾儘偱偼僐儞僼傿僌儗乕僔儑儞偵丄
PLLDIV = 5
CPUDIV = OSC1_PLL2
FOSC = HSPLL_HS
偲偁偭偨偺偩偑丄乽倀俽俛儌僕儏乕儖傪搵嵹偟偰偄傞偑屘偵乿偺婡擻偱丄倀俽俛傪婎弨偲偟偨俹俴俴偺條側偺偩丅
倀俽俛偺僼儖僗僺乕僪偱偁傞係俉俵俫倸偵懳偟偰丄係俵俫倸偺攞悢偺僋儘僢僋偟偐妱傝摉偰傜傟側偄丅
偮傑傝奜晹僆僔儗乕僞偼侾俀丄侾俇丄俀侽丄俀係丒丒丒丒埲奜偼搵嵹弌棃側偄丅乮侾俀俵俫倸埲壓偼撪晹俉俵俫倸偱懳墳乯
搵嵹僋儕僗僞儖偼俀侽俵俫倸偩偐傜乛係偱
PLLDIV = 5
偼敾傞丅
偱丄婥晅偐側偐偭偨偺偑乭CPUDIV = OSC1_PLL2乭偱乽俋俇俵俫倸偺彍嶼偭偰壗丠乿偭偰帠丅
FOSC = HSPLL_HS
偲偡傞偲乽倀俽俛偺俹俴俴傪僆僔儗乕僞偲偟偰俋俇俵俫倸傪CPUDIV = OSC1_PLL2偱妱偭偨廃攇悢偵偡傞傛乿偲尵偭偰偄偨偺偩丅
偩偐傜
PLLDIV = 5
CPUDIV = OSC1_PLL2
FOSC = HS
偲偟偰傗傞帠偱丄
丒奜晹僋儘僢僋偼俀侽俵俫倸
丒撪晹僋儘僢僋偼乛侾偱摍壙
丒僆僔儗乕僞偼俹俴俴傪巊傢側偄乮倀俽俛亅俹俴俴偱偼柍偄両乯
偲偄偆堄枴偵側傞傛偆偩丅
偙傟偱傗偭偲儅僩儌側僨傿儗僀偺姰惉丅
 偱傕偨偭偨悢峴偺僜乕僗側偺偵傑偩媈栤偑丅
偱傕偨偭偨悢峴偺僜乕僗側偺偵傑偩媈栤偑丅
LATB ^= 0xff;
偭偰壗偩丠丒丒丒丒偭偰挷傋偰嬃偄偨丅
俹俬俠侾俉僔儕乕僘偼儔僢僠儗僕僗僞側傞傕偺偑懚嵼偟偰丄億乕僩巜掕偺戙傢傝偵偙偺儗僕僗僞傪憖嶌偡傞帠偱戙懼弌棃傞偲偄偆偺偩両
偮傑傝
丒暔棟僺儞偵傾僋僙僗偡傞
丒偦偺抣傪庢摼偟偰儗僕僗僞偵搉偡
丒憖嶌屻偵暔棟僺儞儞偵傾僋僙僗偡傞丅
偲偄偆岺掱傪
丒暔棟僺儞偺抣傪俴俙俿儗僕僗僞偵婰榐偡傞丅
丒憖嶌屻偵暔棟僺儞儞偵傾僋僙僗偡傞丅
偲偟偰丄僺儞偵傾僋僙僗偡傞夞悢傪尭傜偟偰偄傞丅
偙傟偵傛傝懍偄摦嶌傕儈僗偡傞帠側偔壱摥偡傞偲偄偆帠側偺偩丅
傑偨偙偺俴俙俿偼價僢僩枅偺憖嶌偑壜擻偱丄
LATBbits.LATB1
偲偡傞偲乽俴俙俿俛儗僕僗僞偺侾斣傪乿偲偄偆堄枴偵側傞丅
偩偐傜巊偄暘偗偲偟偰偼丄
丒弌椡偺憖嶌偼乮摿偵價僢僩憖嶌偼儗僕僗僞婰榐傪尒傟偽椙偄偐傜乯俴俙俿柦椷傪丄
丒擖椡偼乮儗僕僗僞偵彂偄偰側偄偐傜乯俹俷俼俿柦椷傪丄
偲側傞丅
偮傑傝忋婰僾儘僌儔儉偼乽俴俙俿俛儗僕僗僞傪倃俷俼偣傛乿偭偰帠偩偭偨傫偩両
偩偲偟偨傜億乕僩俛慡晹側傫偰栜懱柍偄偐傜丄
LATBbits.LATB7 ^= 1;
偵偡傟偽偄偄傫偠傖傫両
偙傟偱傗偭偲乽俴俤俢僠僇僠僇乿僾儘僌儔儉偺夝愅偑廔椆両乮愭丒丒挿偘乣側乣丒丒丒丒乯
堏怉奐巒
傕偆柺搢偩偐傜俥俉俉亄俫俬俿俤俠俫亅俠偺僜乕僗傪偦偺傑傑僐僺儁両
柪傢偢僐儞僷僀儖両僄儔乕偑巭傑傜側偄椳傕巭傑傜側偄丒丒丒丒丅
愭偢偼丒丒丒丒偲丄ANSEL=丒丒丒丒丒偦傫側傕傫偁傝傑偣傫僄儔乕丒丒丒丒僴僢僴僢両
傾僫儘僌擖椡偺愝掕
俉俉偲堘偆偺偼傾僫儘僌偑侾侽僠儍儞僱儖偁傞偐傜俉價僢僩偱偼昞偣側偄丅
偩偐傜偦傕偦傕俙俶俽俤俴偲偄偭偨儗僕僗僞偑柍偄栿偩丅
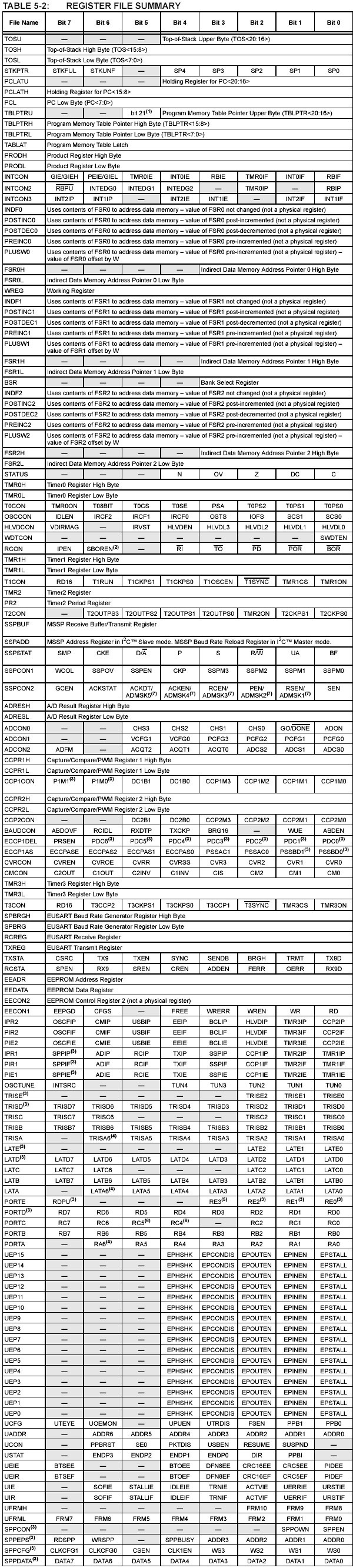
俙俢俠俷俶侾偺儗僕僗僞
| 7bit | 6bit | 5bit | 4bit | 3bit | 2bit | 1bit | 0bit |
| 枹巊梡 | 枹巊梡 | VCFG1 | VCFG0 | PCFG3 | PCFG2 | PCFG1 | PCFG0 |
偙偺PCFG3-0傪巊偭偰丄乮A丗傾僫儘僌乛D丗僨僕僞儖丄AN7-5偼枹巊梡乯
| PCFG3-0 | AN12 | AN11 | AN10 | AN9 | AN8 | AN7 | AN6 | AN5 | AN4 | AN3 | AN2 | AN1 | AN0 |
| 0000 | A | A | A | A | A | A | A | A | A | A | A | A | A |
| 0001 | A | A | A | A | A | A | A | A | A | A | A | A | A |
| 0010 | A | A | A | A | A | A | A | A | A | A | A | A | A |
| 0011 | D | A | A | A | A | A | A | A | A | A | A | A | A |
| 0100 | D | D | A | A | A | A | A | A | A | A | A | A | A |
| 0101 | D | D | D | A | A | A | A | A | A | A | A | A | A |
| 0110 | D | D | D | D | A | A | A | A | A | A | A | A | A |
| 0111 | D | D | D | D | D | A | A | A | A | A | A | A | A |
| 1000 | D | D | D | D | D | D | A | A | A | A | A | A | A |
| 1001 | D | D | D | D | D | D | D | A | A | A | A | A | A |
| 1010 | D | D | D | D | D | D | D | D | A | A | A | A | A |
| 1011 | D | D | D | D | D | D | D | D | D | A | A | A | A |
| 1100 | D | D | D | D | D | D | D | D | D | D | A | A | A |
| 1101 | D | D | D | D | D | D | D | D | D | D | D | A | A |
| 1110 | D | D | D | D | D | D | D | D | D | D | D | D | A |
| 1111 | D | D | D | D | D | D | D | D | D | D | D | D | D |
庢傝姼偊偢AN1-0傪巊偆偺偱丄
ADCON1=0b1101=0x0d
偲側傞丅
傑偨婎弨揹埑傕俉俉偲媡偵側偭偰偄偰丄
| VCFG1-0 | 亅揹埑 | 亄揹埑 |
| 00 | Vss | Vdd |
| 01 | Vss | Vref+ |
| 10 | Vref- | Vdd |
| 11 | Vref- | Vref+ |
俙俢俠俷俶侽偺僠儍儞僱儖傕摨條偵侾侽僠儍儞僱儖暘偁傞偺偱儗僕僗僞傕丄
| 7bit | 6bit | 5bit | 4bit | 3bit | 2bit | 1bit | 0bit |
| 枹巊梡 | 枹巊梡 | CHS3 | CHS2 | CHS1 | CHS0 | GO/DONE | ADON |
僠儍儞僱儖偺愝掕偼丄
| CHS3-0 | 僠儍儞僱儖 |
| 0000 | AN0 |
| 0001 | AN1 |
| 0010 | AN2 |
| 0011 | AN3 |
| 0100 | AN4 |
| 1000 | AN8 |
| 1001 | AN9 |
| 1010 | AN10 |
| 1011 | AN11 |
| 1100 | AN12 |
俙俶俽俤俴偺戙傢傝偲尵偭偰偼壗偩偑丄怴偨偵俙俢俠俷俶俀偑懚嵼偡傞丅
| 7bit | 6bit | 5bit | 4bit | 3bit | 2bit | 1bit | 0bit |
| ADFM | 枹巊梡 | ACQT2 | ACQT1 | ACQT0 | ADCS2 | ADCS1 | ADCS0 |
ADCS偼俉俉偲摨偠愝掕撪梕丅
| 俹俬俠偺廃攇悢 | TOSC | ADCS2 | ADCS1 | ADCS0 |
| 00.00MHz乣01.25MHz | 2 | 0 | 0 | 0 |
| 01.25MHz乣02.50MHz | 4 | 1 | 0 | 0 |
| 02.50MHz乣05.00MHz | 8 | 0 | 0 | 1 |
| 05.00MHz乣10.00MHz | 16 | 1 | 0 | 1 |
| 10.00MHz乣20.00MHz | 32 | 0 | 1 | 0 |
| 20.00MHz乣40.00MHz | 64 | 1 | 1 | 0 |
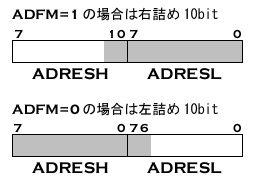 ADFM傕俉俉偲摨偠丅乮仺乯
ADFM傕俉俉偲摨偠丅乮仺乯
怴偨偵僨乕僞庢摼偺堊偺僐儞僨儞僒拁揹帪娫乮傾僋僀僕僔儑儞帪娫乯偺愝掕偑昁梫側傛偆偩丅
棟孅偼敾傜傫偑丄廩揹帪娫偼栺侾俁倳倱埲忋傪梫偡傞偲偺帠側偺偱丄
| ACQT2-0 | TAD |
| 000 | 0 |
| 001 | 2 |
| 010 | 4 |
| 011 | 6 |
| 100 | 8 |
| 101 | 12 |
| 110 | 16 |
| 111 | 20 |
TAD=僋儘僢僋廃婜*TOSC
傛傝丄
0.05us*32=1.6us
偲側傝丄
TAD=13us/1.6us=8.215us佮8
偲側傞傜偟偄丅
偟偐偟乽傫側傕傫丄廫暘偵媗傔傝傖偄偄偠傖傫偐両乿偺峫偊偐傜丄
TAD=12
偲偟偰丄
ACQT2-0=101
偲偡傞丅
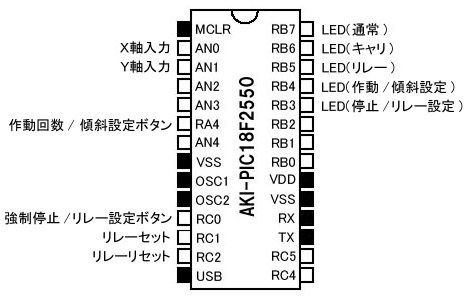 僺儞偺攝抲
僺儞偺攝抲
傾僫儘僌偺愝掕偑姰椆偟偰師偺僄儔乕偼乽俼俛侾乿偲偄偭偨曄悢偺榖丅
偱傕偙傟偭偰僺儞斣崋偩偐傜偦傟傪寛掕偟側偑傜偠傖側偄偲恑傑側偄丅
偩偐傜偙偙偱僺儞偺攝抲傪峴側偆丅
偙傟偐傜偼媡偵偙傟傪尒側偑傜僾儘僌儔儉傪曄峏偟偰偄偔栿偩丅
壗傕峫偊偢偵RC4-5傪儕儗乕僗僀僢僠偵偟偨傜儔僢僠僄儔乕偵側偭偨丅
僿僢僟乕僼傽僀儖傪挷傋傞偲側傫偲両RC3-5偼儔僢僠偑柍偄両
傛偔敾傜傫偑偦偆偄偆傕偺偩偲巚偆帠偵偡傞丅
乮偭偰偐RC3偭偰懚嵼偟偰側偄両偭偰帠偵偙偙偱婥晅偔両乯
PORTA偼弌棃傞偩偗傾僫儘僌梡偵庢偭偰抲偄偰丅
偦傟偱傕傑偩俉屄傕梋偭偰傞傕傫偹偉乣両
偝偰師丅
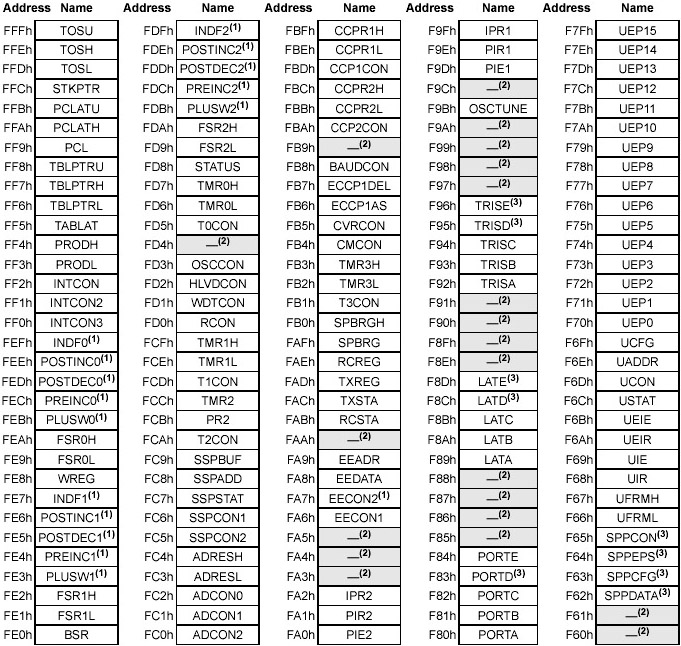
TRMT=丒丒丒丒丒偦傫側掕媊偼柍偄両僄儔乕丒丒丒丒壗偱丠
僿僢僟乕僼傽僀儖偵傕僨乕僞僔乕僩偵傕掕媊偑偁傞偟丠
偄傠偄傠嶲徠偟偰夝偭偰偒偨偺偑乽俫俬亅俿俤俠俫丂俠偲俠侾俉偺尵岅偺堘偄乿偭偰帠丅
椺偊偽俫俬亅俿俤俠俫丂俠偺僿僢僟乕掕媊偼丄
-----------------------------------------------
volatile丂bit TX9D @ ((unsigned)&TXSTA*8)+0;
volatile丂bit TRMT @ ((unsigned)&TXSTA*8)+1;
丂丂丂丂丂bit BRGH @ ((unsigned)&TXSTA*8)+2;
丂丂丂丂丂bit SYNC @ ((unsigned)&TXSTA*8)+4;
丂丂丂丂丂bit TXEN @ ((unsigned)&TXSTA*8)+5;
丂丂丂丂丂bit TX9 @ ((unsigned)&TXSTA*8)+6;
丂丂丂丂丂bit CSRC @ ((unsigned)&TXSTA*8)+7;
-----------------------------------------------
偲側偭偰偄偰TRMT偑僟僀儗僋僩偵巜掕弌棃傞丅
偟偐偟俠侾俉偺応崌偼丄
-----------------------------------------------
extern volatile near struct {
丂unsigned TX9D:1;
丂unsigned TRMT:1;
丂unsigned BRGH:1;
丂unsigned SENDB:1;
丂unsigned SYNC:1;
丂unsigned TXEN:1;
丂unsigned TX9:1;
丂unsigned CSRC:1;
}丂TXSTAbits;
-----------------------------------------------
偲側偭偰偄偰TXSTAbits.TRMT偲偟側偄偲僟儊偩偭偨傫偩丅
偙傝傖丄傛偔傛偔僿僢僟乕僼傽僀儖偲庱偭堷偒偱僐儞僶乕僩偟側偄偲僟儊偩側丒丒丒丒丅
偱傕峫偊偰傒傝傖丄偙偭偪偺曽偑曄悢偺巜掕娫堘偄偑柍偔偰岲偒偩側丅
師偼丄CHS0=丄GODONE=丂丂丂丒丒丒丒傕偆梫椞偑敾傟偽偙偭偪偺傕偺偩偧両
ADCON0bits.CHS0=
ADCON0bits.GO_DONE=丂丂丂丒丒丒丒丒偲丅
EEADR=丂丂丂偁傟丠僄儔乕偠傖側偄丠丒丒丒丒偳偆傕價僢僩巜掕偺柍偄儗僕僗僞僼傽僀儖偼僟僀儗僋僩偵巜掕偡傞條偩丅
EEPGD=丂丂丂EECON1bits.EEPGD=
RD=丂丂丂丂丂EECON1bits.RD=
WREN=丂丂丂EECON1bits.WREN=
憡曄傢傜偢丄
EECON2=0x55;
EECON2=0xAA;
偼偍傑偠側偄偲偟偰昁梫側條偱偁傞丅
SWDTEN=丂丂丂WDTCONbits.SWDTEN=
側偳側偳丒丒丒丒
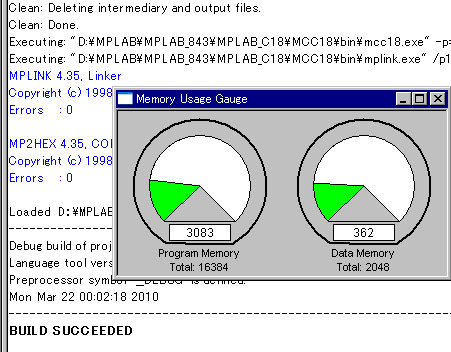
偙偆偟偰僐儞僶乕僩傪恑傔偭偨寢壥丅乮仺乯
3083/16384=1/5.3
偁傟丠俉攞偠傖側偐偭偨偭偗丠
尵岅偵傛偭偰僀儞僋儖乕僪偺梕検傕僐儞僷僀儖掕媊傕堘偆偺偐側丠
偱傕傑偀丄偁偲俆攞偺僾儘僌儔儉偑慻傔傞傫偩偐傜儓僔偲偟傛偆両
擖椡揹尮媦傃俠俹倀偺
丒VDD/VSS
丒MCLR
丒OSC1/OSC2
傪徣偄偨僽儗僢僪僷僞乕儞丅
偁傟丠
僙儞僒乕偺揹尮偑偄傞偠傖傫両
偍偭両
梋偭偰傞僺儞偐傜弌椡偡傟偽柍懯側夞楬偑柍偔側傞偧両
挻僔儞僾儖両
 嘩.倀俽俛捠怣傪峴側偆
嘩.倀俽俛捠怣傪峴側偆
寢榑偐傜尵偆偲乽嬼慠惉岟偟偨庤昳乿忬懺偱丄慡偔棟夝偟偰偄側偄傑傑幚尰偟偰偄傞丅
僴僢僉儕尵偭偰乽壗傕峫偊偢儊僠儍僋僠儍傗偭偨傜弌棃偨乿忬懺偺堊丄嵞尰偟傛偆偵傕巚偄偮偒偺楢懕偩偭偨傕偺偩偐傜丄嵟弶偐傜傕偆堦搙怳傝曉偭偰傒偨丅
偟偐偟壓婰偺曽朄偱乽杮摉偵僩儔僽儖偑柍偄偺偐丠乿偵偮偄偰偼慡偔敾傜側偄偺偱丄嶲峫偵偝傟傞応崌偼偁偔傑偱傕帺屓愑擟偱偍婅偄偟傑偡傢偄丅
嘆倀俽俛僼儗乕儉儚乕僋偺僟僂儞儘乕僪仌僀儞僗僩乕儖
MicroChip幮偺USB Framework for PIC18, PIC24 & PIC32偐傜乽Microchip Application Libraries v2010-02-09 乿傪僟僂儞儘乕僪仌僀儞僗僩乕儖偡傞丅
傑偀丄偙傟偼栤戣側偄丅
倀俽俛偺僼儗乕儉儚乕僋偲偄偆偐傜俷俽偵棈傓僐傾僔僗僥儉偐偲巚偄偒傗僒儞僾儖廤偩偭偨丅
偟偐偟偙偺僒儞僾儖廤丄朿戝夁偓偰偳傟傪尒傟偽偄偄偺偐丠慡偔敾傜傫丅
偲偵偐偔庤摉偨傝師戞偵揥奐偟偰傒傞丅
栺堦廡娫偐偗偰係侽侽嬤偄僒儞僾儖偺拞偐傜娭學偁傝偦偆側悢廫屄傪俵俹俴俙俛偵妡偗偰偄偔偆偪偵
乽USB Device - CDC - Serial Emulator乿
偺拞偺
乽USB Device - CDC - Serial Emulator - C18 - PICDEM FSUSB.mcp乿
傪棙梡偡傟偽偄偄偲敾柧偟偨帠偲丄偦偺僾儘僕僃僋僩偺廋惓曽朄偑摫偒弌偣偨丅
嘇僜乕僗偺曄峏
楳偭偰偄傞偆偪偵僆儕僕僫儖偺乽Microchip Solutions乿偺拞偑墭偔側偭偰偟傑偆偺偱丄巊梡偟偨偄崁栚偩偗傪暿偵僐僺乕偟偰巊偆丅
倎乯乽Microchip Solutions乿偺拞偐傜乽Microchip乿僼僅儖僟偲乽USB Device - CDC - Serial Emulator乿僼僅儖僟傪暿偺嶌嬈椞堟偵僐僺乕偡傞丅
倐乯乽USB Device - CDC - Serial Emulator乿仺乽USB Device - CDC - Serial Emulator - C18 - PICDEM FSUSB.mcp乿傪俵俹俴俙俛偵揥奐偡傞丅
們乯儊僯儏乕偺Configure 仺 Select Device 偱2550傪慖戰丅
倓乯main.c
僐儞僼傿僌儗乕僔儑儞偺婰弎偼係俆俆侽梡側偺偱俀俆俆侽梡偵彂偒姺偊傞丅
#if defined(PICDEM_FS_USB)乣#elif defined(PIC18F87J50_PIM)偺娫偺婰弎傪嶍彍偟丄帺暘偺婰弎偵曄偊傞丅
/** CONFIGURATION **************************************************/
#if defined(PICDEM_FS_USB) // Configuration bits for PICDEM FS USB Demo Board (based on PIC18F4550)
丂丂#pragma config PLLDIV = 5 // (20 MHz crystal on PICDEM FS USB board)
丂丂#pragma config CPUDIV = OSC1_PLL2
丂丂#pragma config USBDIV = 2 // Clock source from 96MHz PLL/2
丂丂#pragma config FOSC = HSPLL_HS
丂丂#pragma config FCMEN = OFF
丂丂丂丂丂丂丂丒
丂丂丂丂丂丂丂丒
丂丂丂丂丂丂丂丒
丂丂#pragma config WRTC = OFF
//丂#pragma config WRTD = OFF
丂丂#pragma config EBTR0 = OFF
丂丂#pragma config EBTR1 = OFF
//丂#pragma config EBTR2 = OFF
//丂#pragma config EBTR3 = OFF
丂丂#pragma config EBTRB = OFF
#elif defined(PIC18F87J50_PIM) // Configuration bits for PIC18F87J50 FS USB Plug-In Module board
傪丄
/** CONFIGURATION **************************************************/
#if defined(PICDEM_FS_USB) // Configuration bits for PICDEM FS USB Demo Board (based on PIC18F4550)
#pragma config PLLDIV=5
#pragma config CPUDIV=OSC1_PLL2
#pragma config USBDIV=2
#pragma config FOSC=HS
//#pragma config FCMEM=
//#pragma config IESO=
#pragma config PWRT=ON
#pragma config BOR=OFF
#pragma config BORV=2
#pragma config VREGEN=ON
#pragma config WDT=ON
//#pragma config WDTPS=32768
#pragma config MCLRE=ON
#pragma config LPT1OSC=OFF
#pragma config PBADEN=OFF
//#pragma config CCP2MX=
#pragma config STVREN=OFF
#pragma config LVP=OFF
#pragma config XINST=OFF
#pragma config DEBUG=OFF
#pragma config CP0=OFF,CP1=OFF,CP2=OFF,CP3=OFF,CPB=OFF,CPD=OFF
#pragma config WRT0=OFF,WRT1=OFF,WRT2=OFF,WRT3=OFF,WRTB=OFF,WRTC=OFF,WRTD=OFF
#pragma config EBTR0=OFF,EBTR1=OFF,EBTR2=OFF,EBTR3=OFF,EBTRB=OFF
#elif defined(PIC18F87J50_PIM) // Configuration bits for PIC18F87J50 FS USB Plug-In Module board
偲彂偒姺偊傞丅
倕乯main.c
#include "./USB/usb.h"丂仺丂#include "usb.h"
#include "./USB/usb_function_cdc.h"丂仺丂#include "usb_function_cdc.h"
#include "./uart2.h"丂仺丂#include "uart2.h"
倖乯usb_device.c
#include "./USB/USB.h"丂仺丂#include "USB.h"
#include "./USB/usb_function_msd.h"丂仺丂#include "usb_function_msd.h"
倗乯usb_descriptors.c
#include "./USB/usb.h"丂仺丂#include "usb.h"
#include "./USB/usb_function_cdc.h"丂仺丂#include "usb_function_cdc.h"
倛乯Project仺BuildOptions仺Project偺"include serch Path"偲"Liblary serch Path"偵
丒"mcc18\lib"
丒僀儞僗僩乕儖偟偨僼儗乕儉儚乕僋撪偺
microchip\include
microchip\include\usb
傪捛壛丅
 嘊奺僼傽僀儖偺僜乕僗曄峏
嘊奺僼傽僀儖偺僜乕僗曄峏
偙偺帪揰偱價儖僪偡傞偲偙偺僄儔乕偵側傞丅乮伀乯乮仺乯
HardwareProfile.h:105:Error [1099] "Demo board not defined.
Either define DEMO_BOARD for a custom board or select the correct processor for the demo board."
HardwareProfile.h偱乽奩摉偡傞俠俹倀偑柍偄乿偲尵偭偰偄傞偺偩丅
僐僺乕偟偨乽CDC - Serial Emulator乿僼僅儖僟偺拞偺乽HardwareProfile.h乿傪奐偄偰丄
#if defined(__18CXX)
丂丂#if defined(__18F4550)
丂丂丂丂#include "HardwareProfile - PICDEM FSUSB.h"
丂丂#elif defined(__18F87J50)
丂丂丂丂#include "HardwareProfile - PIC18F87J50 PIM.h"
丂丂#elif defined(__18F14K50)
丂丂丂丂#include "HardwareProfile - Low Pin Count USB Development Kit.h"
丂丂#elif defined(__18F46J50)
丂丂丂丂#include "HardwareProfile - PIC18F46J50 PIM.h"
丂丂#elif defined(__18F47J53)
丂丂丂丂#include "HardwareProfile - PIC18F47J53 PIM.h"
丂丂#endif
#endif
傪丄
#if defined(__18CXX)
丂丂#if defined(__18F2550)
丂丂丂丂#include "HardwareProfile - PICDEM FSUSB.h"
丂丂#elif defined(__18F87J50)
丂丂丂丂#include "HardwareProfile - PIC18F87J50 PIM.h"
丂丂#elif defined(__18F14K50)
丂丂丂丂#include "HardwareProfile - Low Pin Count USB Development Kit.h"
丂丂#elif defined(__18F46J50)
丂丂丂丂#include "HardwareProfile - PIC18F46J50 PIM.h"
丂丂#elif defined(__18F47J53)
丂丂丂丂#include "HardwareProfile - PIC18F47J53 PIM.h"
丂丂#endif
#endif
偲丄柍棟傗傝曄峏偡傞両
偙傟偱僞乕僎僢僩偑惵怓偺"HardwareProfile - PICDEM FSUSB.h"偵堏傞丅
 嵞傃價儖僪偡傞偲崱搙偼乽俴俙俿俢偑柍偄乿僄儔乕偑弌傞偺偱丄
嵞傃價儖僪偡傞偲崱搙偼乽俴俙俿俢偑柍偄乿僄儔乕偑弌傞偺偱丄
摨偠僼僅儖僟撪偺乽HardwareProfile - PICDEM FSUSB.h乿傪奐偄偰丄
#define mInitAllLEDs()丂 LATD &= 0xF0; TRISD &= 0xF0;
丂丂#define mLED_1丂 LATDbits.LATD0
丂丂#define mLED_2丂 LATDbits.LATD1
丂丂#define mLED_3丂 LATDbits.LATD2
丂丂#define mLED_4丂 LATDbits.LATD3
偺LATD晹暘傪曄峏偡傞丅
偙偺僜乕僗傪尒傞偲丄偳偆傕丄
A3,A4
B2-B7
C1,C4,C5
偼巊偭偰偄傞條側偺偱丄
B0,B1
C0,C2
摉傝偵妱傝摉偰偰傒傞丅
傑偨LATD偺僀僯僔儍儔僀僘偼梫傜側偄偺偱僐儊儞僩傾僂僩偵偡傞丅
//#define mInitAllLEDs()丂 LATD &= 0xF0; TRISD &= 0xF0;
丂丂#define mLED_1丂 LATBbits.LATB0
丂丂#define mLED_2丂 LATBbits.LATB1
丂丂#define mLED_3丂 LATCbits.LATC0
丂丂#define mLED_4丂 LATCbits.LATC2
傕偭偲傕丄偙傟傜偼俴俤俢偺愝掕側偺偱丄昁梫側偗傟偽慡晹僐儊儞僩偵偟偰傕偄偄偲巚偆丅
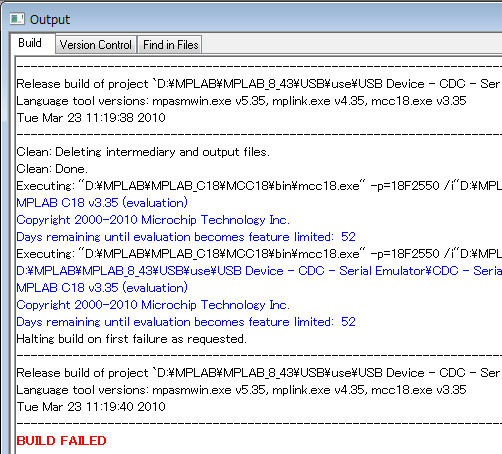
嵞傃偙偙偱價儖僪偡傞偲偙偆側傞丅乮仺乯
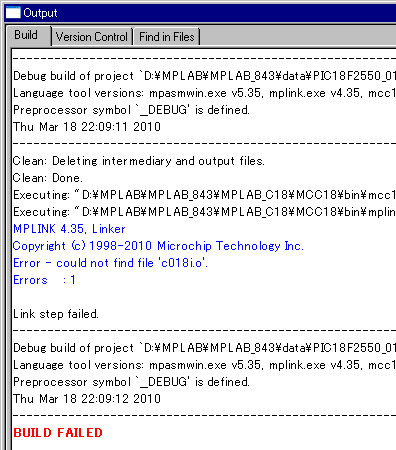
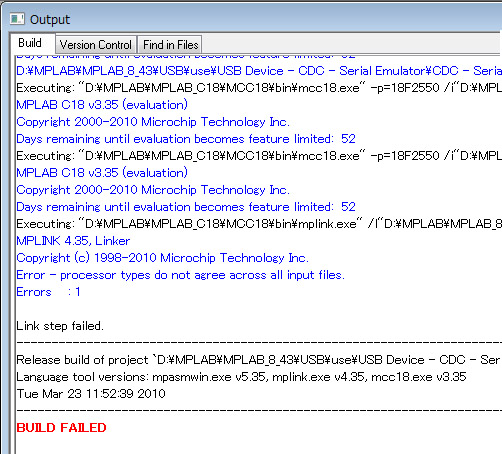
僐儞僷僀儖偼惉岟偟偨偑儔僀僽儔儕偺儕儞僋偱乽俠俹倀偑堘偆両乿偲弌偰偄傞丅
僄儔乕偵側偭偨儕儞僇乕傪挷傋傞偲丄
"D:\MPLAB\MPLAB_C18\MCC18\lib" "rm18f4550 - HID Bootload.lkr"
偲偺婰弎偑偁偭偨丅
偙偺僄儔乕偺拞偱巊偭偰偄傞儕儞僇乕偼偙傟偩偗丅
壗偱俫俬俢側偺丠偺媈栤偼偁傞偑婥偵偣偢rm18f4550 - HID Bootload.lkr傪奐偔丅
昁梫偲偡傞儔僀僽儔儕偑丄
FILES c018i.o
FILES clib.lib
FILES p18f4550.lib
偲偁偭偨偺偱丄
FILES c018i.o
FILES clib.lib
FILES p18f2550.lib
偲丄柍棟傗傝曄峏偡傞両
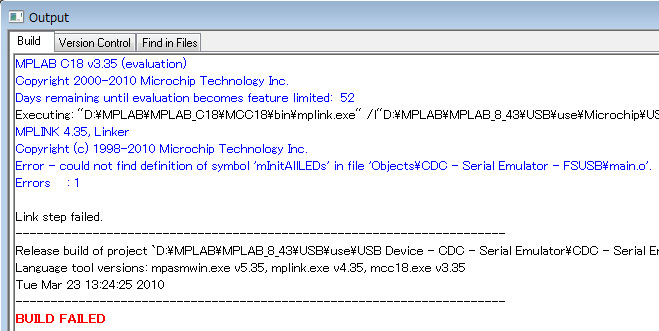
傫偱丄傑偨價儖僪丅
乽main.c偺"mInitAllLEDs"偭偰側傫偩丠乿僄儔乕丅
偦偭偐丅
偝偭偒"HardwareProfile - PICDEM FSUSB.h"偺拞偱僐儊儞僩偵偟偨傫偩丒丒丒丒偭偰帠偱丄
void UserInit(void)
{
丂丂unsigned char i;
丂丂InitializeUSART();
丂丂丂丂丒
丂丂丂丂丒
丂丂丂丂丒
丂丂mInitAllLEDs();
}//end UserInit
傪丄
void UserInit(void)
{
丂丂unsigned char i;
丂丂InitializeUSART();
丂丂丂丂丒
丂丂丂丂丒
丂丂丂丂丒
//丂mInitAllLEDs();
}//end UserInit
偲偡傞偲丒丒丒丒丒
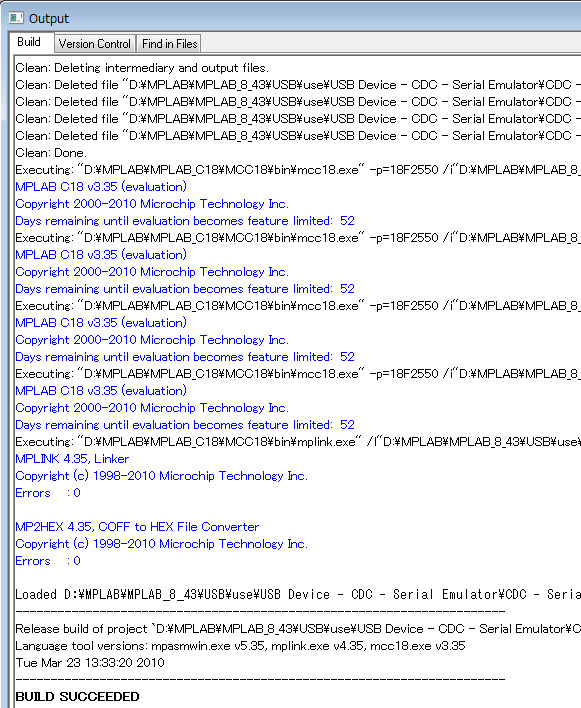
尒帠惉岟両両両丠丠丠
偙傫側柍棟僋儕愴朄偱杮摉偵偄偄傫偩傠偆偐丠丠丠
偭偰側媈栤偑惎偺條偵堦攖僠儔晅偒側偑傜傕俠俹倀偵從偄偰傒傞丅
倀俽俛傪愙懕偡傞偲丄偪傚偭偲娫傪抲偄偰乽晄柧側僨僶僀僗乿僄儔乕丅
偙偺屻壗搙傕僩儔僀偡傞傕偺偺摨偠寢壥丅
柍棟傗傝mchpcdc.inf傪擣幆偝偣傛偆偲偟偨偑乽昁梫側忣曬偑偁傝傑偣傫乿僄儔乕丅
偆乣傫丒丒丒壗偑娫堘偭偰傞傫偩傠偆丒丒丒丒丅
偄傠偄傠僌僌僢偰傒偨拞偵乽偦傫側帪偼夞楬傪尒捈偟偰傒傛偆乿偲偁偭偨丅
偊丠夞楬丠丒丒丒偦傫側傫娭學偁傫偺偐丠
妋偐偵夞楬偼幬孹僙儞僒乕偺傑傑偱壗傕楳偭偰側偄丅
偩偭偰丄儗僨傿忬懺偐丠斲偐丠側傫偰擖椡偺榖偩傛側丒丒丒丒傫偭丠丒丒丒丒擖椡丠
幬孹僙儞僒乕偭偰楢懕偟偰傾僫儘僌怣崋乮揹埑抣乯傪弌椡偟偰傞傛側丠丒丒丒丒傑丒偝丒偐丒丒丒丒丅
偭偰帠偱丄俁幉壛懍搙僙儞僒乕傪夞楬偐傜奜偟偰傒偨傜丄傾僢僒儕偲僷僜僐儞偑僪儔僀僶傪暦偄偰偒偨丒丒丒丒傫偲偐傛丒丒丒丒丒旀傟偨丒丒丒丒丒丒丒丅
 僐儈儏僯働乕僔儑儞億乕僩乮俠俷俵係乯
僐儈儏僯働乕僔儑儞億乕僩乮俠俷俵係乯
偲偁傞偺偱丄僴僀僷乕僞乕儈僫儖偱愝掕偡傞丅
乮偪側傒偵倁倝倱倲倎埲崀偵僴僀僷乕僞乕儈僫儖偼柍偄傫偩偭偰丠抦傜側偐偭偨傛両倃俹偩偭偰帠偑巚偄愗傝僶儗偪傑偭偨偤偂両仼暿偵峔傢側偄偗偳両乯
僾儘僌儔儉撉傓偺偑柺搢廘偄偺偱丄偳偆偣乽僋儞儘僋僀僠僴僠僲儞乿偩傠偆偲愝掕丅
峴偗偭両丒丒丒丒丒偁傟丠壗傕弌側偄丒丒丒丒丒丒壗偱丠
壗偐帺暘偱彂偐側偄偲僟儊側偺偐側丠丒丒丒偲丄main.c偺拞傪挱傔傞偲
main{
丂丂丂丂丂丂丂丒
丂丂丂丂丂丂丂丒
丂丂// Application-specific tasks.
丂丂// Application related code may be added here, or in the ProcessIO() function.
丂丂丂丂丂丂丂丒
丂丂丂丂丂丂丂丒
}
偺婰弎傪敪尒丒丒丒丒丒偦偭偐丄偙偙偵帺暘偱僾儘僌儔儉傪彂偗両偭偰偐丅
偭偰側栿偱丄
main{
丂丂丂丂丂丂丂丒
丂丂丂丂丂丂丂丒
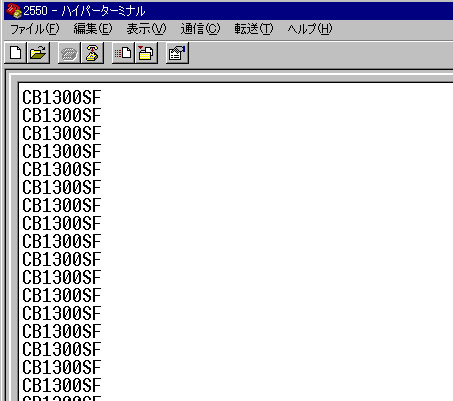
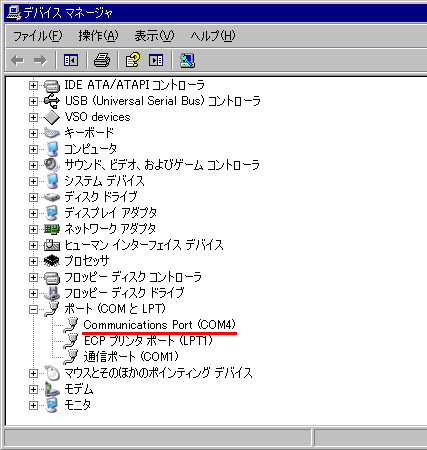
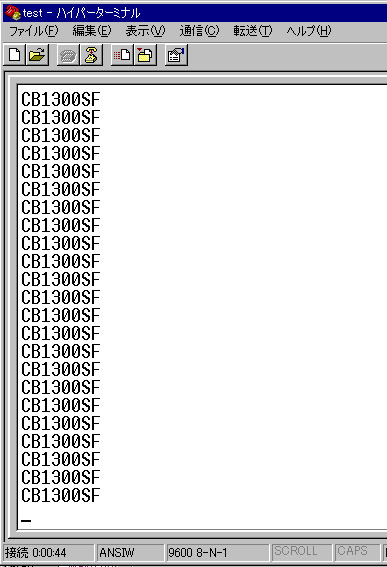
丂丂putrsUSBUSART("CB1300SF\r\n");
丂丂丂丂丂丂丂丒
丂丂丂丂丂丂丂丒
}
偲彂偄偰傒偨寢壥偑丄偙偺復偺朻摢偺僴僀僷乕僞乕儈僫儖偺夋憸丅
傗偭偲捠怣偑壜擻偵側偭偨栿偩丅偄傗乣挿偐偭偨丅
========================================================================================
傫偱丄偙偙傑偱彂偄偲偄偰壗偩偑倀俽俛巊偆偺巭傔偨両
偩偭偰丄偙偙傑偱偺宱堒尒偨偭偟傚丅壗丠偙偺僀儞僋儖乕僪偺検両
main.c
usb_device.c
usb_function.c
usb_descriptors.c
uart2.h
Compiler.h
GenericTypeDefs.h
PICDEMFSUSB.h
HardwareProfile.h
HardwareProfile - PICDEM FSUSB.h
usb.h
usb_ch9.h
usb_common.h
usb_device.h
usb_function_cdc.h
usb_hal.h
usb_hal_pic18.h
usb_config.h
慡晹偺僿僢僟乕僼傽僀儖傪捛偭偰峴偭偨傜偁偲婔偮弌偰偔傞偺偐丒丒丒丒僶僢僇偠傖偹乣偺両丠偭偰悢偠傖傫丅
偪側傒偵乭CB1300SF乭偺暥帤楍傪憲怣偡傞偩偗偺僾儘僌儔儉儊儌儕徚旓検偼3599/16384偱慡儊儌儕偺栺俀俀亾丅
偙傟偼搻擄杊巭傾儔乕儉俀崋婡偺慡僾儘僌儔儉偺侾侾俈亾偵憡摉偡傞丅
偙傫側傕傫愨懳偵帺暘偺僾儘僌儔儉偵寢崌側傫偐偝偣偰傗傫偹偭両
崱夞傗傝偨偄帠偼乽倀俽俛僨僶僀僗惢昳傪奐敪偡傞乿偭偰帠偠傖側偔偰乽僨乕僞捠怣偱悢抣傪尒偨偄乿栿偱丄
偙傟偩偭偨傜僔儕傾儖捠怣偺曽偑傛偭傐偳寉偄偠傖傫両偭偰寢榑偵側傞栿偩丅
傗偭傁俠俹倀偺俿倃偲俼倃嬻偗偲偄偰傛偐偭偨丒丒丒丒丅
傑偀丄偙偺僔儕乕僘偑堦抜棊偟偨傜偒偭偲嶌傝偨偄儉僔偑摦偄偰乽俁幉壛懍搙僙儞僒乕傪墳梡偟偨倀俽俛嬻娫儅僂僗乿側傫偧傕嶌傝偨偔側傞偩傠偆偰丅
偦偺帪偺偍曌嫮偩偲巚偊偽埨偄楯椡偱偁傠偆丒丒丒丒丒偭偰側栿偱倀俽俛捠怣偺榖偼偙傟偱偍偟傑偄両
嘪丏僨僶僢僌嵞傃
嘆僔儕傾儖捠怣偺慻傒崬傒嵞傃
僾儘僌儔儉傪尦偵栠偟偰幚峴偡傞傕丄傗偼傝摦偒偑偍偐偟偄丅
偦傝傖丄僺儞攝抲傪楳偭偪傖偭偨偐傜巇曽偑柍偄偺偩偑丄杮摉偵僙儞僒乕偑摥偄偰偄傞偺偐丠傪尒側偄偲婥偑擺傑傜側偄偺偱丄偙偙偼傕偆堦搙僔儕傾儖傪愙懕偡傞
倀俽俛捠怣偟側偄側傜倀俽俛偺壙抣偑柍偄偺偱愗傝棧偡丒丒丒丒偭偰帠偼丄幚憰傪堄幆偟偨扨敪俠俹倀偲偟偰埖偆帠偵偟偰撪晹僋儘僢僋偵愗傝懼偊傞丅
僐儞僼傿僌傪丄
PLLDIV = 2 Divide by 2 (8 MHz oscillator input)
FOSC = INTOSC_HS Internal oscillator, HS used by USB
偵愝掕偡傞傑偱傕寢峔僷僘儖忬懺丅
摉慠揹尮嫙媼傕奜晹俆倁偵栠偟側偑傜丄側傫傗偐傫傗娵堦擔傪旓傗偟丄嵟屻偵側偭偰OSCCON偺愝掕傪朰傟偰偄傞帠傪敪尒丒丒丒丒偲傎傎偩傛丒丒丒丒丅
 嘇倀俽俙俼俿偺嬱摦
嘇倀俽俙俼俿偺嬱摦
扨暥帤偺弌椡傪妋擣偟偨偲偙傠偱倀俽俙俼俿巇條偵曄峏偡傞丅
崱偼傑偩俤倀俽俙俼俿傑偱摢偑夞傜側偄偺偱偲傝偁偊偢丅
偩偐傜SPBRGH偼巊傢側偄偺偱0x00偲偡傞丅
撪晹僋儘僢僋俉俵俫倸偵曄峏偟偨偐傜俉俉偲摨偠愝掕偺
俉俵俫倸丄俋俇侽侽儃乕乮SPBRG=0x0C乯偵偡傞丅
偮傑傝丄
OpenUSART(USART_TX_INT_OFF & USART_RX_INT_OFF & USART_ASYNCH_MODE & USART_EIGHT_BIT &USART_CONT_RX & USART_BRGH_LOW, 12);
test="CB1300SF\r\n"
putsUSART(test);
偱帋偟偵弌偟偰傒偨丅乮仺乯
傗偭傁暥帤楍傪弌椡偱偒傞偺偼偆傟偟偄両
偙傟偱堦暥帤弌椡偐傜奐曻偝傟偦偆偩両
 偙偙傑偱偺僽儗僢僪忬懺丅乮仺乯
偙偙傑偱偺僽儗僢僪忬懺丅乮仺乯
攝慄傪僕儍儞僷乕儚僀儎偐傜慄偵曄偊偨傜悘暘偲僗僢僉儕偟偨丅
乮堦儢寧偑夁偓偰丒丒丒丒丒乯
偊偭偲丄偳偙偐傜榖偦偆偐側丒丒丒丒丅
偙偺堦儢寧娫偲偄偆傕偺儕儌僐儞梡偺揹攇偵娭偡傞偍曌嫮偱妡偐傝偭偒傝偩偭偨丅
枹偩偵曽岦惈傪寛傔傞棟孅偵娭偡傞寢榑偑弌側偄偺偱偙偙偵彂偔栿偵傕偄偐偢丄廬偭偰夞楬偐傜傕棧傟偰偄偨忬懺丅
傑偀丄傕偆彮偟帪娫傪妡偗偰揹攇棟榑傪攃埇偟側偄帠偵偼恑傔側偄偺傛丒丒丒丒丅
 偲偙傠偱丄偦偺崌娫偵夞楬偵捠揹偟偰傒傞偲僔儕傾儖捠怣偺怣崋偑偍偐偟側帠偵側偭偰傞丅
偲偙傠偱丄偦偺崌娫偵夞楬偵捠揹偟偰傒傞偲僔儕傾儖捠怣偺怣崋偑偍偐偟側帠偵側偭偰傞丅
夞楬傪怗傞偲僨僞儔儊側昞帵傪偡傞偺偩丅
愙怗晄椙丠
偱傕僽儗僢僪儃乕僪偺僺儞偵偼宷偑偭偰偄傞偟丒丒丒丒丅
悢擔屻丄懅傪傂偦傔偰嬌傔偰僨儕働乕僩偵怗傞偲暥帤壔偗偟側偄帠偑敾柧丅
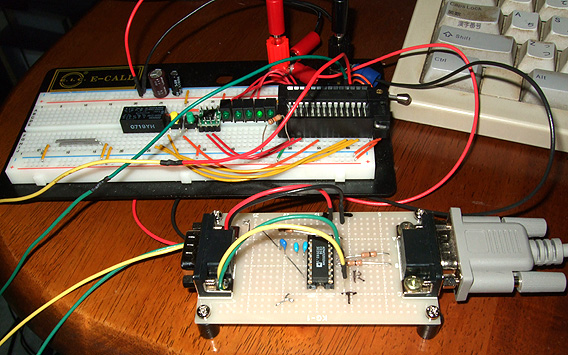
傗偭傁傝怗傟傞偙偲偱偺忈奞偲敾抐偟偰僔儕傾儖捠怣晹暘傪暘棧偟偰婎斅偵屌掕偡傞帠偵偟偨丅
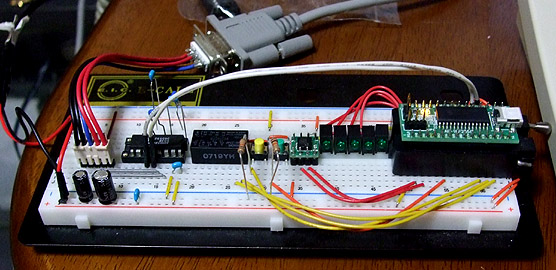
D-sub9僺儞乮僆僗丒儊僗乯愱梡婎斅僙僢僩俁侽侽墌丅
偙傟偵ADM3202AN傪嵹偣傞丅
傑偨倀俽俛傪枹巊梡偵偟偨堊丄幨恀偺傛偆偵廐寧儌僕儏乕儖傪巭傔偰丄PIC18F2550偵曄峏偟偨丅
偝偰丄偙偙偐傜嵞傃柍慄偺榖偵栠傞偺偩偑丄偙傟傑偱偙偙偵堦弿偵彂偄偰偄偨丅
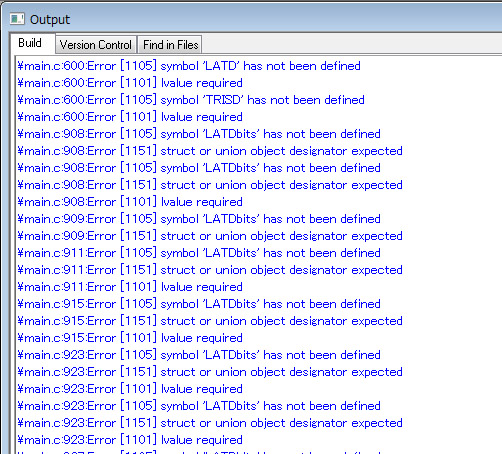
偟偐偟丄偡偱偵傕偆乮業岝婍摨條偵乯寢峔側儃儕儏乕儉偵側偭偰偄傞丅
僶僇僨僇偔側偭偰丄偲偭偰傕撉傒偵偔偔側偭偰偒偨偺偱丄暘棧偡傞帠偵偟偨丅
忋婰傑偱偑俀侽侾侽擭俀寧丅
傫偱丄嵞傃偙偙偵栠偭偰偒偨偺偑俀侽侾侽擭俇寧丅
柍慄偲奿摤偡傞帠丄栺係儢寧梋傝丒丒丒丒丒旀傟偨傛丒丒丒丒丒寢榑偐傜尵偆偲乽僔儑僢僾偐傜偺挧愴傪曉傝摙偪偵偟偰偔傟偨偤偂両両乿偱偁傞丅
傑偀丄撉傫偱傒偰壓偝偄側丒丒丒丒
偲偄偆栿偱柍慄儌僕儏乕儖傪惂攅偡傞両偱偡丅
傑偨丄儕儌僐儞傪惂偟偨抜奒偱丄嵞傃俀俆俆侽偵栠傞栿偩偑丄偦傠偦傠偙偺儁乕僕傕僨僇偔側偭偰偒偨丅
偩偐傜俀俆俆侽巇愗傝捈偟偲偄偆堄枴偱儁乕僕傪暿偵愝偗傛偆丅
偙偺儁乕僕偺懕偒偼乽俀俆俆侽姰寢曇両乿偱丅